Control Algorithm Development
An important part of this project is the development of a high-performance control system for the UPS. In order to ensure high steady-state performance and fast dynamic response, advanced Model Predictive Control techniques were proposed for the control of the UPS system.
Several scientific articles have been published regarding these innovative techniques.






Fault Diagnosis and Fault Tolerance
One of the main objectives of the project is the development of fast and accurate fault diagnosis techniques to detect problems in all main components of the UPS (including all semiconductors, filters, etc.). For this purpose, two distinct approaches are studied and pursued:
- Non-redundant fault tolerance techniques – using as little additional hardware as possible and using no switch redundancy. These solutions provide lower cost, but a lower degree of protection.
- Redundant fault tolerance techniques – These techniques rely mostly on the inclusion of additional (redundant) converter legs, which are used to replace faulty ones. In this project, a modular topology is adopted, in which redundant converter legs can be used to correct faults in any of the UPS modules.



Development of Custom Hardware Solutions
In this project, the proposed solutions are first tested using hardware solutions already available in the laboratory. However, to truly demonstrate the viability of the proposed solutions, custom hardware solutions are being developed, aiming to reach a high technology readiness (a pre-industrial solution).
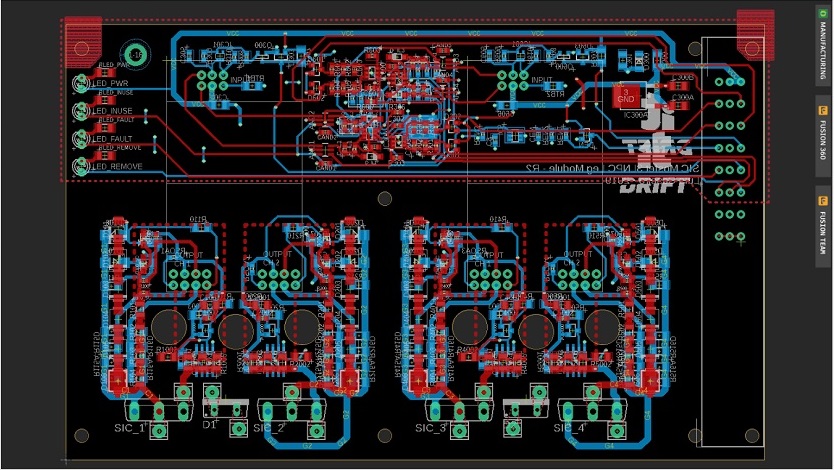
This process includes the in-house design of all required systems, including custom printed circuit boards (PCBs) and electronics systems for measurement, signal conditioning, analog-to-digital conversion, digital isolation, protection, custom switch and driver circuitry, etc.
All required PCBs and electronic circuits are designed by our research team, produced by a professional PCB manufacturer, and assembled in the laboratory. All components of the prototype are then thoroughly tested. Whenever problems are detected, the system is redesigned and the process is repeated.











PCBs Testing
For testing the PCBs our team used regular laboratory tools, such as oscilloscopes, multimeters, and controlled power supplies.
The Mosfet driver circuits were also tested in different operating conditions, as well as their protection circuits.
All measurement circuits were calibrated using high-precision sensors and tested with high voltage and current to access precision and noise levels.




Adopted Controller philosophy
Due to their high cost, lab-oriented rapid prototyping control platforms are not viable for industrial implementation. On the other hand, in order to execute the highly computationally intensive model predictive control techniques, as well as real-time monitoring and fault diagnosis, a powerful control platform is required, ruling out cheap microcontrollers and DSPs.
In order to obtain a high-performance and low-cost control platform, a hybrid computation philosophy was selected. Thus, the research team is developing a custom control platform based on Xilinx Zynq chips, which include a processor and an FPGA. This solution takes advantage of both the FPGA and ARM processor present in the Zynq chips. The FPGA enables a perfect synchronization of inputs/outputs, as well as a parallel, high-speed deterministic execution of all control and diagnostic algorithms. This enables the use of very complex control algorithms with very low sampling times. On the other hand, the ARM processor enables data acquisition, intuitive user interface and real-time monitoring of all control signals.
One of the main priorities when developing the custom control platform is to ensure an easy programming, suitable for rapid prototyping and lab/research solutions. For this reason, the FPGA is programmed using Matlab/Simulink (instead of regular VHDL language, which is highly complex and requires highly specialized manpower). During the development, two main Zynq-based development boards were used: Zedboard and Ultra96.


Custom Control Platform
Even though many development boards are available using Zynq chips, none of these offer all the required inputs and outputs for power electronics control, especially those at a low price-point. For this reason, a custom Control Platform is being developed.
The custom Control platform uses an Ultra96 board as its core (its brain), which provides a highly powerful Zynq Ultrascale+ chip, with a high-resource FPGA, a quad-core ARM Cortex-A53 processor, and a dual-core ARM Cortex-R5 real-time processor. This provides all the processing power and versatility required for the control platform, at a very low cost.
A base-board was developed for the custom control platform, which receives the Ultra96 and includes 8 channels of simultaneous-aquisition ADCs. Additional ADCs can be added simply by stacking additional ADC expansion boards (as many as needed). Despite its high processing power, the Ultra96 board comes with a relatively low number of FPGA ports available at its headers, which are insufficient for all the digital inputs/outputs required by the UPS system (for the activation all power switches, etc.). For this reason, secondary low-cost FPGAs are used to manage all digital I/O. These secondary FPGAs communicate with the main controller using high-speed communication buses. The Ultra96 can communicate with several secondary FPGAs simultaneously, providing a highly expandable and highly versatile system.



